Уважаемые друзья, привожу материал, который предоставил и попросил меня выложить на нашем форуме А. Митюрёв.
Информация, размышления о моделях класса S2P.
Коллеги, друзья. Пока на форуме нашем не выделен специальный раздел под класс моделей S2P, вот я и привожу свои размышления о возможной концепции модели здесь. Впрочем, как и нет (пока нет) данной категории моделей и среди официальных чемпионатных классов. Но предполагаю, данный класс скоро будет введен в сетку чемпионатов. Модели S2P уже демонстрировались на последнем ЧМ-2014 в Болгарии американскими моделистами. Планируются ими же демонстративные полеты таких моделей и на ЧМ-2016 во Львове. И похоже, что введение S2P - просто дело времени.
Не смотря на кажущуюся простоту для постройки и запуска во время соревнований, на самом деле данный класс моделей как никакой другой требует (опять же для стабильно успешных выступлений) - сочетания собственно конструячения (постройки) и применения мат апрарата / привлечения софта по определению ЛТХ и достигаемой высоты полета с последующей (после проведения летных испытаний) корректировкой и пр.
Американцы в этом классе уже поднаторели достаточно - каждый год а США проводятся национальные соревнования по моделям очень схожим по требованиям, предъявляемым к S2P, называемые "Team America Rocket Challenge" (TARC), пусть и среди школьников, НО! собираемые по числу участников куда больше, чем по всем другим категориям (февским и даже - нефаевским) вместе взятым. Более того, данные соревнования являются и самыми масштабными соревнованиями по ракетному моделизму в мире.! В 2015 году в очной части этих общенациональных соревнований США приняло участие 100 команд из различных штатов, с общим числом участников 540 (!), которым предшествовала стадия заочных (на местах) квалификационных полетов, в которых первоначально было зарегистрировано 695 команд из 48 штатов. И по итогам этих квалификационных и выбирается лучшая сотня для финальной очной встречи.
Для справки:
- каждая команда представляла к полетам одну модель и может состять из нескольких (как я понял 4-9 или около того) членов;
- каждый год технич. требования к моделям для TARC несколько меняются для того, чтобы каждый год принявшие в соревнованиях команды возвращались к циклу проектирования-конструирования-постройки моделей, и не использовали модели предыдущего года.
Технич. требования к моделям в 2015:
- Модель должна заключать в себя сырое куриное яйцо (целостность которого после посадки является имитацией непревышения допустимого уровня перегрузок при посадке и является обязательным условием зачетного полёта);
- Начальная стартовая масса: не более 650 г;
- Суммарный импульс двигателя: не более 80 N*сек;
- Минимальная длина модели: 650 мм;
- При возвращении модель должна разделяться на 2 части, при этом часть содержащая яйцо и измеряющий высоту альтиметр должны спускаться на одном/единственном парашюте.
Определение результата:
- Соревнования проводятся на точность достижения наперед заданной высоты 800 футов (243.8 м) и на точность времени полета (46-48 сек), отсчитываемого от взлета до посадки на землю блока с альтиметром и яйцом. За отклонения достигнутой высоты на каждый фут (0.305 м) и каждую секунду полёта от заданных величин начисляется 1 очко.
При этом во втором полете контрольная высота полёта уменьшалась на 25 футов, а контрольное время - на 1 секунду
- Окончательный результат складывается из очков, полученных за 2 успешных полета. Наименьшая сумма баллов выявляет победителя.
В этом году победитель TARC - команда Школы из Русселвила (шт. Алабама) в двух полётах набрала всего 16.16 штрафных баллов (12.0 и 4.16 баллов за 1-й и 2-й полёт соотв.), в 2 раза меньше штрафных баллов чем команда, занявшая 2-е место (33.52 балла).
Команда-победитель получила не только неплохой денежный приз в размере $20,000 но и право представлять США на международной встрече-соревнованиях, проводившейся в июне 2015 во время Аэрошоу в Париже, где также были представлены команды Франции и Великобритании, представлявшиеся также командами-победителями схожих с TARC США национальными соревнованиями. Команда американских школьников из Русселвила и там оказалась победительницей.
Помимо денежных призов за занятые места на TARC в первой десятке, были учреждены и нашли своих обладателей специальные призы за:
- лучшее мастерство;
- лучший творческий подход
- лучшую информационно-разъяснительную деательность
- лучшие костюмы команды
- лучшее мастерство в изготовлении ракеты
- дух TARCа
- лучший общий дизайн полёта
- лучшие презентации.
А вот тут то и интересно в плане подхода / концепции модели для хорошего результата .... В номинации “За лучший общий дизайн полёта” отмечаются работы за наиболее технически сложный и передовой подход к управлению полётными характеристиками модели. И каждый год несколько команд демонстрировали интереснейшие автономные бортовые системы управления. На прошедших соревнованиях победитель в этой номинации, команда школьников AIAA из графства Оранж (Калифорния) использовала на модели бортовой компьютер, подсоединенный к дополнительному альтиметру для постоянного измерения текущей высоты, и вычисляющий скорость полёта, и прогнозирующий на этой основе достигаемую апогейную высоту и затем выдающий сигнал на исполнительные органы управления - тормозные щитки для выхода на заданную высоту апогея, а далее на этапе спуска (компьютер этот) подавал сигнал на рычаг управления рифованием купола парашюта для реализации необходимой скорости спуска и обеспечения заданного времени полёта (спуска).
Как мне показалось, если брать отсюда подход к модели для S2P, схема с управлением а/д сопротивления на этапе взлёта, реализованная таким образом, несколько усложненная (достижение этой цели - выход модели на заданную высоту можно выполнить куда проще, а значит и надёжнее - о чём несколько ниже), хотя в данном случае и боле гибкая по отношению к разбросау характеристик применяемых двигателей, ЛТХ модели (в том числе и её а/д характеристик), отклонений погодных условий и т.д.
Но вот управление геометрией/аэродинамическим сопротивлением парашюта - это именно то (и именно таким образом), что и нужно делать для постоянства в достигаемых результатов в выходе на заданное время полёта.
Реализация в модели выхода на заданную высоту (Hзад):
Здесь - достаточно очевидное решение: раскрытие системы спасения (парашюта) по достижении на заданную высоту по команде, поданной с доп. альтиметра, конечно, с учётом гистерезиса/задержек на исполнение. НО! Тут не совсем всё просто, как первоначальноо кажется. Во-первых, модель должна долететь на заданную высоту (и если не залетит то открытие должно осуществиться в апогее траектории). Но и вводить в действие парашют на достаточно большой скорости (если апогей траектории намного превышает бесштрафную/заданную высоту Hзад) - сами знаете - не есть хорошо. А поэтому необходимо провести некоторые исследования / уточнения, “загнав” характеристики модели в более определённые и узкие рамки - так, чтобы высота полёта модели была несколько (но не на много) заведомо выше установленной к достижению правилами значению высоты Hзад, чтобы поле допусков в разбросе характеристик двигателей (прежде всего по суммарному импульсу), погодных условий (прежде всего: скорости ветра, приняв ко вниманию, что если скорость на уровне земли можно померить и внести какие-то корректировки в модель, то вот профиль скорости бокового ветра никак не измеришь для каждого конкретного полёта; и плотность воздуха) соответствовали в нижних значениях собственно значению установленной к достижению высоты Hзад (ну и плюс какая-то дельта Hdelta на неопределённость/незнание каких-то факторов, могущих уменьшить высоту полёта).
Последовательность создания модели мне представляется следующим образом:
1. Прорисовка-дизайн модели:
- внутренняя - для представления о стартовой массе модели (в первом приближении). Конечно, к этому моменту должны определиться (опять же в первом приближении) используемый тип двигателя с его характеристиками (Массой, суиммарным импул;ьсом, диаграммой Тяга-Время) и используемые альтиметры;
- внешняя - для последующего определения коэфф. а/д сопротивления.
2. Матем. моделирование - расчёт высоты полёта на основании предварит. данных пункта 1, пользуясь тем или иным методом / софтом или уже имеющимся у вас / ваших коллег или коммерчески доступном, к примеру RockSim.
3. Корректировка дизайна для того чтобы модель не “залетала” (в ваших расчетах) слишком высоко (предполагаю, что скорее всего так и будет - нужно будет не уменьшать высоту (приближая к установленной правилами Hзад), а именно уменьшать) одним или неск. способами (ухудшением Cx (увелич диаметра , длины)), или увеличивая стартовую массу модели, подгружая её.
4. Постройка модели со всеми внутренностями.
5. Прогонка расчета определения высоты полёта с реально полученными:
- геометрией (а посему и уточненной характеристикой Cx = f (v полёта));
- стартовой массой.
6. Если понадобится ввести корректировку (на основе полученных данных расчета пункта 5) в дизайн модели (подгрузив её или укоротив / удлинив корпус или каким-то другим способом ухудшить/ улучшить а/д сопротивление), приблизив расчетное значение с введёнными корректировками к значению (Hзад + Hdelta).
Кстати, здесь и далее надо помнить/знать, что корректировка аэродинамикой (наиболее простым кажется изменение длины корпуса и/или (что. м.б. более эффективно) увеличением толщины стабилизаторов простым приклеиванием с обоих их сторон пластин) м.б. и более эффективным методом, но менее определённым в плане предсказания и менее точным в плане численного и вероятноностно менее достоверного в цифре эффекта влияния на достигаемую высоту, чем изменением массы модели, изменение которой (вы же знаете сколько в граммах вы прибавляете или убавляете с модели) вам известно в цифрах. И влияние этого изменения будет более жестко (более достоверно в цифрах) сказываться на изменении достигаемой высоты. Когда Вы вносите изменение в геометрию, то нужно ещё оценить сначала, а на сколько это изменение скажется на изменение сначала – Cx (да к тому же сам то Cx есть функция скорости), а уж потом - на сколько изменение в Cx скажется на Высоту. Проще говоря, определённость и достоверность влияния геометрии - меньше чем более “жесткое” и предсказуемое влияние стартовой массы на высоту полёта.
Кроме того, из общеизвестного (или малоизвестного) и из моего опыта:
- График зависимости (при заданной геометрии модели) Высота - Стартовая масса имеет некоторюй оптимум-максимум при некотором значении Моптим. Однако, предполагаю, что в классе S2P для конкретных параметров диапазонов энергетики двигателей, геометрии моделей; и достаточно больших стартовых масс (реализуемых в моделях) этот диапазон масс на графике отстоит на достаточно большое расстояние от значения Моптим, т.е. на нисходящей его ветке, и зависимость эта близка к линейной. Более того, градиент падения на теоретическом графике должен быть близок и к практическому. Отсюда достаточно легко и с достаточной точностью можно сделать корректировку в массе модели для получения Высоты полёта близкой к значению Hзад + Hdelta.
Тем не менее следует помнить, это вы можете подтвердить (и уточнить) и своими расчетами для конкретной модели, что в достаточно малом диапазоне изменения Cx модели зависимость Hпол(Cx) - достаточно близка к линейной с относительным градиентом (Hпол/Hпол)/(Cx/Cx) ≈ 0.6-0.7, т.е. на один процент УВЕЛИЧЕНИЯ Cx приходится примерно 0.6-0.7% УМЕНЬШЕНИЯ высоты полёта Hпол. Тоже соотношение, кстати, приходится и для влияние плотности воздуха на высоту полёта (Hпол/Hпол)/(возд/возд) ≈ 0.6-0.7. Обращаю на это внимание, чтобы делать поправки на разности плотности атмосферы воздуха в тестовых/тренировочных полетах и полётах на соревнованиях.
Проведение серии тестовых/тренировочных полетов с непременным ведением журнала испытаний, куда заносить данные по полетам:
- стартовая масса;
- погодные условия (скорость ветра; температура и давление (откуда орределяется плотность воздуха);
- значение высоты, заведннной в бортовой компьютер для введения в действие системы спасения;
- высота полета, зафиксированная обоими альтиметрами;
- общее время полета;
- какие то другие данные и комментарии, могущие помочь в дальнейшем для внесения корректировок.
Кооме того, особое внимание необходимо уделить "безопасности" возвращения /поиземления, т.е. целостности яйца. К примеру, на соревнованиях TARC скорость спуска превшает 5 м/сек (235 м/(47 сек - время взлёта)) и является достаточно большой. И нужно предусмотреть дополнительные меры, может быть и не только пассивные, помещая яйцо в спец контейнер умягченный bubble wrap (пупырчатым упаковочным материалом), и другими средствами. Но можно предусмотреть какие-то активные (полуактивные) способы мякгой посадки: например, с дополнительного альтиметра снимать сигнал о приближении поверхности земли и выдавать сигнал на полное раскрытие парашюта, который был до этого в неполностью раскрытом состоянии. Конечно, внеся при этом соответствующую поправку в алгоритм и реализацию требования по общему времени полёта. Или же после раскрытия парашюта по достижению высоты уже тогда выводить/раскрывать какие-то доп. смегчающие посадку средства, типа «ёжик», или наддувать мягкие подушки - пофантазируйте, пораскиньте мозгами. Решение может быть вообще очень простым, а значит и надёжным.
Конечно, всех этих исследований с расчетами высоты и применением бортовывого компьютера и дополнительного альтиметра можно и не предпринимать, но тогда это нужно как-то компенсировать (по моему мнению) значительно большей программой испытательных полётов, сведя всё к эмпирике, но это - тоже своя наука по обработке экспериментальных данных с последующей корректировкой в дизайне (и пр.). Тем не менее такой эмпирический подход - пусть и проще, но не даст систематически постоянно более точного результата, близкого к выпонению требований по высоте и времени полёта.
Ну, и конечно, ключ к успеху - многочисленные испытательные и тренировочные полёты. НО! мудрые, чтобы максимально выжимать информацию из каждого полёта. А значит непременно вести статистику, и регистрировать данные в упомянутом выше полётном журнале.
Кстати, одним из основных факторов успеха победителя TARC-2015 явились именно многочисленные - десятки испытательных и тренировочных полётов.
НО! можно чего-то из перечисленного и даже вообще ничего не делать, а играть в угадайку «а вдруг (?)». Можно “зашориться” в своей песочнице местячковыми умышлениями типа “Из-за океана видать лучше видно обстановку, и как нужно выступать…» и оставаться в хвосте иль на обочине развития человечества, технического прогресса, и нашего ракетного моделизма/спорта в частности, и более конкретно - оставаться в полнейшем неведении вообще в чём суть данного класса S2P? Анекдот мне вспоминается:
Мужик решил поступить в консерваторию. Проплатил все экзамены, остался последний, и его надо сдавать обязательно. Преподаватели подводят его к роялю, просят отвернуться, нажимают клавишу: — Угадайте.
Тот поворачивается, пристально обводит всех взглядом, затем тыкает пальцем в одного из преподов и радостно восклицает : «Ты нажал, да?»
А вот у американцев, как очевидно из представленного выше, некоторый опыт в концепции самих моделей, в поиске рациональных решений и в практике запусков в условиях соревнований имеется. Хотелось, чтобы, когда данная категория станет официальной, российские моделисты были бы хоть как-то подготовлены.
Помнится, когда категория S8 была введена как чемпионатный класс - на ЧМ-87 в Югославии Виктор Ковалев (СССР) смог выстрелить “из-за угла”, став первым официальным ЧМ в этом классе, обойдя тех же американцев, которые этот класс культивировали у себя достаточно долго, и небезуспешно. Да, конечно, Виктору сопуствовало везение, но случайным тот результат не назовёшь. Случайностей в этом классе не бывает, собственно белокостники знают это и получше меня. Но это был результат упорной, эффективной работы, и не одного Виктора Александровича, а результат КОЛЛЕКТИВНЫХ усилий. Вот так и в классе S2P, если есть желание достигать в будущем каких-то приемлемых результатов, то необходимо браться сейчас, а не дожидаться, когда класс этот введут в чемпионатный фаёвский - тогда будет уже поздно.
Да и сам этот класс моделей - интерсен очень и динамичен своей потенциальной технической сложностью, ведь не всёж с ребятней напильником и топором работать, а привлекать НАУКУ, и современные достижения в области микроэлектроники. Чем же ещё привлекать ребятню? Уж не ножовкой же. В 21-м веке поди живём.
Ну, а там - как хотите. Это уж вам решать, а то ...
А если не захотите вы, соотечественники - россияне, так кто-то из других информацией пользоваться будет - сайт то не только россияне посещают - и добро пожаловать! - и буду только рад тому!
S2P
Сообщений: 8
• Страница 1 из 1
Re: S2P
![]() Alexey » Сб янв 02, 2016 19:24
Alexey » Сб янв 02, 2016 19:24
Не знаю у кого какое впечатление обо всем об этом? Несомненно в Америке наверное многие ликуют, запуская яйца в небо на нужную высоту и по времени не разбившееся приземление, на мой взгляд это бред какой -то... Сам класс выдуман с какой-то издевкой над высотным, так как высотные классы подразумевают делать очень хорошие аэродинамические модели для достижения наибольшей высоты. Но с другой точки зрения, если этот бред станет чемпионатным, многим придется вникнуть в это... Если вы компетентны в этом, выкладывайте текущие образцы и решения, думаю, найдется простое и альтернативное решение ( как в анекдоте про американцев, которые затратили миллионы долларов на изобретение шариковой ручки, которая будет писать в космосе в невесомости, а русские как писали карандашами так и пишут), хотелось бы видеть более точные технические характеристики, если они( американцы) до этого дошли или это как то размыто вроде длина не менее 650 мм, двигатель до 80н и т.д., может быть фото и видео, если есть.
-

Alexey - Разрядник
- Сообщения: 63
- Зарегистрирован: Вт янв 17, 2006 13:22
- Откуда: Сергиев Посад
Re: S2P
![]() дядя » Сб янв 02, 2016 19:39
дядя » Сб янв 02, 2016 19:39
Алексей +100500 Если так и дальше пойдёт то появится "Чемпионы мира по запуску яиц и сортиров" вместо S-7  Сам считаю этот класс бредом, но Санька попросил я и сбросил информацию.
Сам считаю этот класс бредом, но Санька попросил я и сбросил информацию.
Первый является чемпионом, второй-побеждённым. Остальные тут вообще ни при чём...
-

дядя - Эксперт
- Сообщения: 554
- Зарегистрирован: Сб янв 28, 2006 18:06
- Откуда: россия,москва
Re: S2P
![]() Sputnik » Вс янв 03, 2016 12:17
Sputnik » Вс янв 03, 2016 12:17
Для зрелищности добавить в правила: "...Чемпион награждается почетным омлетом, побежденный дёгтем и перьями..."
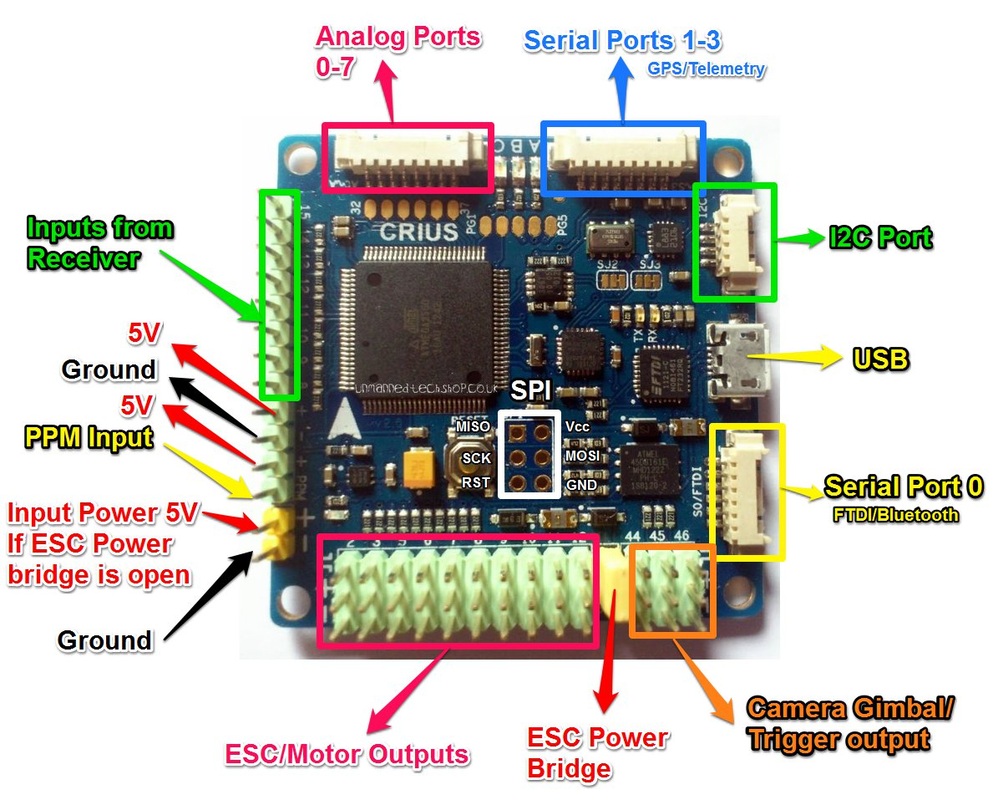
По технике: есть так называемые "мозги для коптера". http://www.unmannedtech.co.uk/uploads/6 ... 4_orig.jpg
Среди схем коптера есть вариант "один двигатель и четыре руля в потоке", прям готовая ракета.
И програмируются они так, что могут направить модель в заданную точку пространства, а потом вернуть на точку старта.
Програмирование и отладка в полете будет процессом длительным и непростым, но возможным.
Сохранить "груз" в целости: запонение грузового отсека строительной пеной не запрещено правилами?
По технике: есть так называемые "мозги для коптера". http://www.unmannedtech.co.uk/uploads/6 ... 4_orig.jpg
{kind=link}
Среди схем коптера есть вариант "один двигатель и четыре руля в потоке", прям готовая ракета.
И програмируются они так, что могут направить модель в заданную точку пространства, а потом вернуть на точку старта.
Програмирование и отладка в полете будет процессом длительным и непростым, но возможным.
Сохранить "груз" в целости: запонение грузового отсека строительной пеной не запрещено правилами?
За то мы делаем ракеты ...
-

Sputnik - Подающий надежды
- Сообщения: 76
- Зарегистрирован: Ср окт 18, 2006 20:18
- Откуда: г. Королев
Re: S2P
![]() Levikh » Сб янв 09, 2016 02:54
Levikh » Сб янв 09, 2016 02:54
Уважаемые коллеги, привожу материал в продолжение рассуждений по теме, который предоставил и попросил меня выложить на нашем форуме Митюрёв Александр.
Братцы мои, привожу свои комментарии на ваши, уже оставленные по этой теме.
По-правде говоря, я и сам по-началу относился к категории моделей с яйцами как если и не бреду, то как к какой-то совсем детской-детсадовской развлекухе, и уж совсем не спорту, а как к нечто схожему с конкурсом наперегонки команд, в руках участников которых ложки с как раз яйцами. НО! Давайте посмотрим на это несколько иначе и будем более толерантными.
Итак, дядя, твоё, сударь «Если так и дальше пойдёт то появятся "Чемпионы мира по запуску яиц и сортиров" вместо S-7». Ну а сортиры то здесь при чём? Яйцо, оно же – один из самых древних сакральных и священных символов, связанных с жизнью, светом, солнцем, теплом ..., а вы его – с сортиром примешиваете. Ну как же так? - чего же здесь предосудительного то в смысле символа?
И потом, на самом деле, что и прежде всего, яйцо - оно же не самоцель. Мы ж в случае уже существующих высотных классов S1 и S5 (в современной трактовке) не называем же их классами по запуску альтиметров на высоту, правильно? Альтиметры являются просто измерительным инструментом. Так и в случае с категорией S2P. И тут, кстати, уважаемый Алексей, комментарий на Ваше замечание «… думаю, найдется простое и альтернативное решение ( как в анекдоте про американцев, которые затратили миллионы долларов на изобретение шариковой ручки, которая будет писать в космосе в невесомости, а русские как писали карандашами так и пишут)» - в данном случае яйцо и служит некоторым аналогом карандаша в противоположность многомиллионнодолларовой шариковой ручке, являясь как раз простым и альтернативным решением инструмента-индикатора и простейшим, общедоступным и дешевым средством, целостность которого после посадки и является критерием/показателем непревышения некоторого допустимого уровня перегрузок при этой посадке. Если у кого-то есть какой-то другой такой же дешевый /простой и доступный вариант инструмента для измерения уровня перегрузок при приземлении (и еще, что не менее важно, такого же простого в обращении с) – предлагайте, направляйте свои предложения в ФАИ / подкомиссию CIAM, если уж вам так претит сам символ яйца, его имидж, или даже само слово, и вы не желаете ассоциировать свою ракетомодельно-спортивную деательность с яйцами – пожалуйста, придумывайте - фантазируйте. Никто ж не против, полагаю.
И еще, Алексей, Ваше замечание: «Сам класс выдуман с какой-то издевкой над высотным, так как высотные классы подразумевают делать очень хорошие аэродинамические модели для достижения наибольшей высоты». Во-первых, класс S2P не заменяет, не подменяет 2-х других высотных классов (S1 и S5). И во-вторых, (что более важно) данный комбинированный класс, является высотным НА ТОЧНОСТЬ попадания в высоту, и НА ТОЧНОСТЬ попадания во время полёта. С одной стороны некоторая (хотя и несколько отдалённая) аналогия со стрелковым спортом - ну, не по целям же нам своими моделями стрелять - тогда уж точно нас заметут (и правильно сделают в таком случае) как раз из соображений безопасности. А с другой стороны - некоторая аналогия с отлично знакомой Вам ракетомодельной категорией S8P, - на точность и по времени, и по месту посадки. Только вот в случае с S8 предполагается обязательное р/у моделистом (с земли). А S2 как раз запрещает проводить какое-либо управляющее воздействие с земли (в том числе и р/у), но и не запрещает при этом автономное бортовое управление. И более того, для наиболее успешных результатов в этом классе как раз и предполагается использование подобного оборудования. А это как раз и должно подстёгивать использовать микроэлектронику, автоматику в сочетании с применением соответствующего математич аппарата, софта - и именно по тематике ракетной науки, по различным её направлениям, да плюс с несколько отличным подходом (чем в других классах моделей) к испытательным и тренировочным полётам. Вот вам и разнообразие, и широкая палитра, и поле деятельности для творчества! При таком вот рассмотрении кто-нибудь может назвать S2P категорией несерьёзной, достойной только внимания веселящихся малышей? И в таком случае разве не будут модели этого класса и соревнования по ним отражать в себе научный, технический, и технологический прогресс как большой ракетной техники, так и необходимость в этом прогрессе нашего (технического же ведь!) спорта?
Ну, а если всего этого – электроника-автоматика-софты-компьютера -матаппараты нам неизвестны, да мы к тому же ими и заниматься (разбираться/осваивать) не хотим, что ж это тоже можно и так. Но вот, Алексей, правильно Вы пишете «если …. станет чемпионатным, многим придется вникнуть в это... ».
Только вот я то предлагаю если и не немедленно заниматься постройкой моделей класса этого, то по-крайней мере ознакомиться-приглядеться, «пощупать воду», пораскинуть мозгами - НЕПРЕМЕННО, а не то поздно будет. И подойти к категории этой не с некоторым пренебрежением, поскольку если оно такое будет, то лучше и не браться за это и «пропустить этот вес». Зачем же насильно себя вздрючивать, заниматься тем, к чему душа то не лежит?
Но вот прикиньте, наверное, неспроста в США этот класс, вернее близкое (по требованиям к моделям и правилам проведения) к этому - соревнования TARC, уже проводятся (пусть и среди школьников) вот уже 13 лет и являются самыми масштабными в мире! Кроме того, подобные программы ведутся и в других, не в самых отсталых в мире по научно-техническому-технологическому уровню - Великобритании, Франции, Японии, Австралии. И наверное, неспроста, эти программы в перечисленных странах поддерживаются аэрокосмическими компаниями стран этих. Не знаю, как в последне перечисленных, а вот в США непосредственное участие в организации и проведении соревнований TARC принимают (и при том ключевые позиции по организации и проведению) представители аэрокосмической индустрии страны в настоящем или в прошлом. Наверное, в категории этой всё же есть что-то поболее чем просто детские забавы.
Да, и кстати, местом проведения последних TARC-2015, да и соревнований 2016 было/будет Манассас (шт. Виржиния). Одна из причин выбора места - достаточная близость к столице США, Вашингтону, так что команды участники имели бы возможность подъехать на Капиталийский холм для встречи со своими представителями - членами Конгресса, показать свои ракеты и рассказать о р/м и своих достижениях в TARC. И половина команд как раз и воспользовалась такой уникальной возможностью и приехала на день раньше, чтобы принать участие в специально организованной встрече «Ракеты на Холме» с сенаторами и конгрессменами. Мне представляется, что если там в моделях (и за ними) была бы какая-то лапша / бред, то влиятельные мужи, сенаторы с конгрессменами, встечаться с заигравшимися в развлекуху детишками не стали бы. Как вы считаете?
Да, вот к слову / в тему пришлось, а вот интересно было бы узнать, какая-нибудь подобная деятельность ведётся руководством Федерации / Комитета по встречам с представителями-избранниками народными из высшего руководства страны? Иль до тех, забрикадировавшихся не добраться? Может быть как-то можно попробовать найти лазейки, и встретиться с теми? М.б. если будет непосредственный контакт тех с детьми, их руководителями, с показом моделек, с представлением глобальных проблем технического творчества, может и не будут тогда издаваться сомнительные законы? И уж если помочь не в силах, может мешать по-крайней мере не будут? Но это - так, к слову, по месту пришлось.
А по вопросу самой категории S2P - попробуйте всё ж взглянуть на модельки / класс этот без предубеждений, и будем более толерантными...
Братцы мои, привожу свои комментарии на ваши, уже оставленные по этой теме.
По-правде говоря, я и сам по-началу относился к категории моделей с яйцами как если и не бреду, то как к какой-то совсем детской-детсадовской развлекухе, и уж совсем не спорту, а как к нечто схожему с конкурсом наперегонки команд, в руках участников которых ложки с как раз яйцами. НО! Давайте посмотрим на это несколько иначе и будем более толерантными.
Итак, дядя, твоё, сударь «Если так и дальше пойдёт то появятся "Чемпионы мира по запуску яиц и сортиров" вместо S-7». Ну а сортиры то здесь при чём? Яйцо, оно же – один из самых древних сакральных и священных символов, связанных с жизнью, светом, солнцем, теплом ..., а вы его – с сортиром примешиваете. Ну как же так? - чего же здесь предосудительного то в смысле символа?
И потом, на самом деле, что и прежде всего, яйцо - оно же не самоцель. Мы ж в случае уже существующих высотных классов S1 и S5 (в современной трактовке) не называем же их классами по запуску альтиметров на высоту, правильно? Альтиметры являются просто измерительным инструментом. Так и в случае с категорией S2P. И тут, кстати, уважаемый Алексей, комментарий на Ваше замечание «… думаю, найдется простое и альтернативное решение ( как в анекдоте про американцев, которые затратили миллионы долларов на изобретение шариковой ручки, которая будет писать в космосе в невесомости, а русские как писали карандашами так и пишут)» - в данном случае яйцо и служит некоторым аналогом карандаша в противоположность многомиллионнодолларовой шариковой ручке, являясь как раз простым и альтернативным решением инструмента-индикатора и простейшим, общедоступным и дешевым средством, целостность которого после посадки и является критерием/показателем непревышения некоторого допустимого уровня перегрузок при этой посадке. Если у кого-то есть какой-то другой такой же дешевый /простой и доступный вариант инструмента для измерения уровня перегрузок при приземлении (и еще, что не менее важно, такого же простого в обращении с) – предлагайте, направляйте свои предложения в ФАИ / подкомиссию CIAM, если уж вам так претит сам символ яйца, его имидж, или даже само слово, и вы не желаете ассоциировать свою ракетомодельно-спортивную деательность с яйцами – пожалуйста, придумывайте - фантазируйте. Никто ж не против, полагаю.
И еще, Алексей, Ваше замечание: «Сам класс выдуман с какой-то издевкой над высотным, так как высотные классы подразумевают делать очень хорошие аэродинамические модели для достижения наибольшей высоты». Во-первых, класс S2P не заменяет, не подменяет 2-х других высотных классов (S1 и S5). И во-вторых, (что более важно) данный комбинированный класс, является высотным НА ТОЧНОСТЬ попадания в высоту, и НА ТОЧНОСТЬ попадания во время полёта. С одной стороны некоторая (хотя и несколько отдалённая) аналогия со стрелковым спортом - ну, не по целям же нам своими моделями стрелять - тогда уж точно нас заметут (и правильно сделают в таком случае) как раз из соображений безопасности. А с другой стороны - некоторая аналогия с отлично знакомой Вам ракетомодельной категорией S8P, - на точность и по времени, и по месту посадки. Только вот в случае с S8 предполагается обязательное р/у моделистом (с земли). А S2 как раз запрещает проводить какое-либо управляющее воздействие с земли (в том числе и р/у), но и не запрещает при этом автономное бортовое управление. И более того, для наиболее успешных результатов в этом классе как раз и предполагается использование подобного оборудования. А это как раз и должно подстёгивать использовать микроэлектронику, автоматику в сочетании с применением соответствующего математич аппарата, софта - и именно по тематике ракетной науки, по различным её направлениям, да плюс с несколько отличным подходом (чем в других классах моделей) к испытательным и тренировочным полётам. Вот вам и разнообразие, и широкая палитра, и поле деятельности для творчества! При таком вот рассмотрении кто-нибудь может назвать S2P категорией несерьёзной, достойной только внимания веселящихся малышей? И в таком случае разве не будут модели этого класса и соревнования по ним отражать в себе научный, технический, и технологический прогресс как большой ракетной техники, так и необходимость в этом прогрессе нашего (технического же ведь!) спорта?
Ну, а если всего этого – электроника-автоматика-софты-компьютера -матаппараты нам неизвестны, да мы к тому же ими и заниматься (разбираться/осваивать) не хотим, что ж это тоже можно и так. Но вот, Алексей, правильно Вы пишете «если …. станет чемпионатным, многим придется вникнуть в это... ».
Только вот я то предлагаю если и не немедленно заниматься постройкой моделей класса этого, то по-крайней мере ознакомиться-приглядеться, «пощупать воду», пораскинуть мозгами - НЕПРЕМЕННО, а не то поздно будет. И подойти к категории этой не с некоторым пренебрежением, поскольку если оно такое будет, то лучше и не браться за это и «пропустить этот вес». Зачем же насильно себя вздрючивать, заниматься тем, к чему душа то не лежит?
Но вот прикиньте, наверное, неспроста в США этот класс, вернее близкое (по требованиям к моделям и правилам проведения) к этому - соревнования TARC, уже проводятся (пусть и среди школьников) вот уже 13 лет и являются самыми масштабными в мире! Кроме того, подобные программы ведутся и в других, не в самых отсталых в мире по научно-техническому-технологическому уровню - Великобритании, Франции, Японии, Австралии. И наверное, неспроста, эти программы в перечисленных странах поддерживаются аэрокосмическими компаниями стран этих. Не знаю, как в последне перечисленных, а вот в США непосредственное участие в организации и проведении соревнований TARC принимают (и при том ключевые позиции по организации и проведению) представители аэрокосмической индустрии страны в настоящем или в прошлом. Наверное, в категории этой всё же есть что-то поболее чем просто детские забавы.
Да, и кстати, местом проведения последних TARC-2015, да и соревнований 2016 было/будет Манассас (шт. Виржиния). Одна из причин выбора места - достаточная близость к столице США, Вашингтону, так что команды участники имели бы возможность подъехать на Капиталийский холм для встречи со своими представителями - членами Конгресса, показать свои ракеты и рассказать о р/м и своих достижениях в TARC. И половина команд как раз и воспользовалась такой уникальной возможностью и приехала на день раньше, чтобы принать участие в специально организованной встрече «Ракеты на Холме» с сенаторами и конгрессменами. Мне представляется, что если там в моделях (и за ними) была бы какая-то лапша / бред, то влиятельные мужи, сенаторы с конгрессменами, встечаться с заигравшимися в развлекуху детишками не стали бы. Как вы считаете?
Да, вот к слову / в тему пришлось, а вот интересно было бы узнать, какая-нибудь подобная деятельность ведётся руководством Федерации / Комитета по встречам с представителями-избранниками народными из высшего руководства страны? Иль до тех, забрикадировавшихся не добраться? Может быть как-то можно попробовать найти лазейки, и встретиться с теми? М.б. если будет непосредственный контакт тех с детьми, их руководителями, с показом моделек, с представлением глобальных проблем технического творчества, может и не будут тогда издаваться сомнительные законы? И уж если помочь не в силах, может мешать по-крайней мере не будут? Но это - так, к слову, по месту пришлось.
А по вопросу самой категории S2P - попробуйте всё ж взглянуть на модельки / класс этот без предубеждений, и будем более толерантными...
- Levikh
- Дышащий в спину
- Сообщения: 182
- Зарегистрирован: Пт окт 08, 2010 10:03
Re: S2P
![]() Levikh » Ср фев 24, 2016 12:40
Levikh » Ср фев 24, 2016 12:40
Материал от Александра Митюрёва.
Братцы, может кто-нибудь из россиян-членов команды России построит к ЧМ-2016 модель S2/P и примет участие там и в этом, пока нечемпионатном классе моделей наряду с другими участниками, планирующими выступление в данном классе?
Посему в дополнение к выложенному ранее материалу по S2/P прилагаю нижеследующее.
A. Технические требования к моделям и полетам, определение результата
1. В качестве полезной нагрузки используется одно стандартное сырое куриное яйцо (60 +/- 3г), которое по завершению каждого зачетного полёта не должно быть разрушено / не иметь трещин.
2. Количество моделей.
Для осущесвления 3-х зачетных полётов каждый спортсмен предоставляет к соревнованиям и использует только одну модель.
3. На модели не накладываются никакие ограничения по геометрии (общая длина и диаметр), а также никакие ограничения на стартовую массу, кроме имеющегося в общих положениях по требованиям, пред'являемым к моделям вообще (масса не более 1500 г).
4. Допускается использование нескольких двигателей. Общий суммарный импульс двигателей - не более 160 Н*сек. При использовании только одного двигателя на модели его суммарный импульс - не более 80 Н*сек.
5. Конструкция модели. Должна обеспечивать безопасное приземление частей модели, связанных в единое целое (подобно тому, как например, в классах S3, S6).
6. Система спасения - парашют.
7. Полет.
Высота полёта - 300 метров.
Время полёта - 60 сек.
8. Определение результата и победителя.
В каждом из 3-х зачетных полётов результат складывается из суммы очков:
за каждый метр отклонения в высоте полёта от 300 м начисляется 1 очко;
за каждю секунду отклонения во времени полёта от 60 секунд начисляется 3 очка.
Конечный результат каждого спортсмена складывается из суммы результатов в 3-х полетах. При наличии дисквалификации в каком-либо из 3-х полётов общий результат обнуляется.
Победитель выявляется по наименьшему числу очков.
B. Ссылки на материалы по S2/P
Привожу также ссылки на материалы по этому классу моделей, выложенные на сайте Национальной Ассоциации Ракетомоделистов США (National Association of Rocketry), где приводятся следующие аспекты:
- наиболее важное в категории;
- наиболее сложные проблемы;
- анализ;
- конструкция модели;
- система спасения;
- стратегия на соревнованиях.
В этом же материале приводятся ссылки на 3 других материала по данной теме. Тем не менее привожу эти ссылки здесь:
1. Отчет по соревнованиям в S2P на «Capitol Cup 2013», выполненный Трипом Барбером, директором соревнований (а также участником в данной категории).
Достаточно любопытный (для интересующихся) материал с приведением результатов участников по каждому туру соревнований.
REPORT ON S2P PRECISION FRAGILE PAYLOAD EVENT
Flown September 22, 2013 at “Capitol Cup 2013”, USA
Reported by the Capitol Cup Contest Director, Trip Barber
http://www.nar.org/wp-content/uploads/2 ... p-2013.pdf
2. Материал по S2P в словенском журнале (на словенском языке) с приведением чертежей моделей. Однако, чертежи эти для достаточно детской ''наколенной'', я бы назвал позавчерашней (посему и неприемлемой для российских эксперт-класса моделистов) технологии изготовления - бумажной по выкройкам, но тем не менее дающие представление о возможных геометриях / компоновках модели данного класса.
Slovenian S2P Article & Plan (2014)
http://www.nar.org/wp-content/uploads/2 ... n-2014.pdf
3. Дизайн модели Криса Фланигана (США) с приведением характеристик используемого двигателя, массы модели, расчетных значениях центровки, скоростей, высоты и времени полета.
S2/P Design by Chris Flanigan
http://www.nar.org/wp-content/uploads/2 ... loft2a.pdf
_______________________________________
Честь имею,
-Александр
Братцы, может кто-нибудь из россиян-членов команды России построит к ЧМ-2016 модель S2/P и примет участие там и в этом, пока нечемпионатном классе моделей наряду с другими участниками, планирующими выступление в данном классе?
Посему в дополнение к выложенному ранее материалу по S2/P прилагаю нижеследующее.
A. Технические требования к моделям и полетам, определение результата
1. В качестве полезной нагрузки используется одно стандартное сырое куриное яйцо (60 +/- 3г), которое по завершению каждого зачетного полёта не должно быть разрушено / не иметь трещин.
2. Количество моделей.
Для осущесвления 3-х зачетных полётов каждый спортсмен предоставляет к соревнованиям и использует только одну модель.
3. На модели не накладываются никакие ограничения по геометрии (общая длина и диаметр), а также никакие ограничения на стартовую массу, кроме имеющегося в общих положениях по требованиям, пред'являемым к моделям вообще (масса не более 1500 г).
4. Допускается использование нескольких двигателей. Общий суммарный импульс двигателей - не более 160 Н*сек. При использовании только одного двигателя на модели его суммарный импульс - не более 80 Н*сек.
5. Конструкция модели. Должна обеспечивать безопасное приземление частей модели, связанных в единое целое (подобно тому, как например, в классах S3, S6).
6. Система спасения - парашют.
7. Полет.
Высота полёта - 300 метров.
Время полёта - 60 сек.
8. Определение результата и победителя.
В каждом из 3-х зачетных полётов результат складывается из суммы очков:
за каждый метр отклонения в высоте полёта от 300 м начисляется 1 очко;
за каждю секунду отклонения во времени полёта от 60 секунд начисляется 3 очка.
Конечный результат каждого спортсмена складывается из суммы результатов в 3-х полетах. При наличии дисквалификации в каком-либо из 3-х полётов общий результат обнуляется.
Победитель выявляется по наименьшему числу очков.
B. Ссылки на материалы по S2/P
Привожу также ссылки на материалы по этому классу моделей, выложенные на сайте Национальной Ассоциации Ракетомоделистов США (National Association of Rocketry), где приводятся следующие аспекты:
- наиболее важное в категории;
- наиболее сложные проблемы;
- анализ;
- конструкция модели;
- система спасения;
- стратегия на соревнованиях.
В этом же материале приводятся ссылки на 3 других материала по данной теме. Тем не менее привожу эти ссылки здесь:
1. Отчет по соревнованиям в S2P на «Capitol Cup 2013», выполненный Трипом Барбером, директором соревнований (а также участником в данной категории).
Достаточно любопытный (для интересующихся) материал с приведением результатов участников по каждому туру соревнований.
REPORT ON S2P PRECISION FRAGILE PAYLOAD EVENT
Flown September 22, 2013 at “Capitol Cup 2013”, USA
Reported by the Capitol Cup Contest Director, Trip Barber
http://www.nar.org/wp-content/uploads/2 ... p-2013.pdf
2. Материал по S2P в словенском журнале (на словенском языке) с приведением чертежей моделей. Однако, чертежи эти для достаточно детской ''наколенной'', я бы назвал позавчерашней (посему и неприемлемой для российских эксперт-класса моделистов) технологии изготовления - бумажной по выкройкам, но тем не менее дающие представление о возможных геометриях / компоновках модели данного класса.
Slovenian S2P Article & Plan (2014)
http://www.nar.org/wp-content/uploads/2 ... n-2014.pdf
3. Дизайн модели Криса Фланигана (США) с приведением характеристик используемого двигателя, массы модели, расчетных значениях центровки, скоростей, высоты и времени полета.
S2/P Design by Chris Flanigan
http://www.nar.org/wp-content/uploads/2 ... loft2a.pdf
_______________________________________
Честь имею,
-Александр
- Levikh
- Дышащий в спину
- Сообщения: 182
- Зарегистрирован: Пт окт 08, 2010 10:03
Re: S2P
![]() Mityurev » Ср дек 18, 2019 16:04
Mityurev » Ср дек 18, 2019 16:04
Если тема кому-то интересна, то могу предложить свой вариант решения.
На модели устанавливается два парашюта – тормозной и основной.
Полет модели до заданной высоты обеспечит тормозной парашют, который выбрасывается в заданный момент при полете вверх.
Заданное время полета – основной парашют. Момент его срабатывания определяет бортовая электроника.
Для выполнения такой задачи подходит мой контроллер с прошивкой под класс моделей S2P.
На модели устанавливается два парашюта – тормозной и основной.
Полет модели до заданной высоты обеспечит тормозной парашют, который выбрасывается в заданный момент при полете вверх.
Заданное время полета – основной парашют. Момент его срабатывания определяет бортовая электроника.
Для выполнения такой задачи подходит мой контроллер с прошивкой под класс моделей S2P.
- Вложения
-
-
- Mityurev
- Что-то можешь!
- Сообщения: 46
- Зарегистрирован: Пн апр 14, 2014 09:33
Сообщений: 8
• Страница 1 из 1
Вернуться в Высотные модели (S1, S5)
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 1